








产品介绍
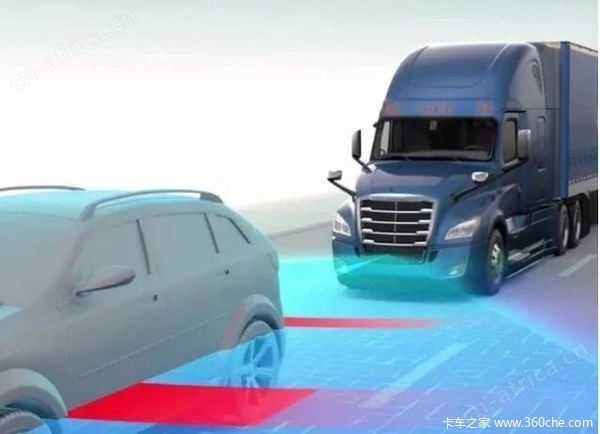
工作原理
汽车行驶过程中,由激光雷达不断探测与前车或障碍物的距离(车间距) ,并根据本车车速,相对车速,车间距等数据,按照建立的数学模型计算出本车是否处于安全行驶状态,当发现存在追尾危险时系统通过声光告警,并限制车辆动力输出;若驾驶员没有来得及采取有效措施,系统将会自动进行点刹或紧急制动,从而降低或者避免追尾事故的发生,为安全出行保航护航!
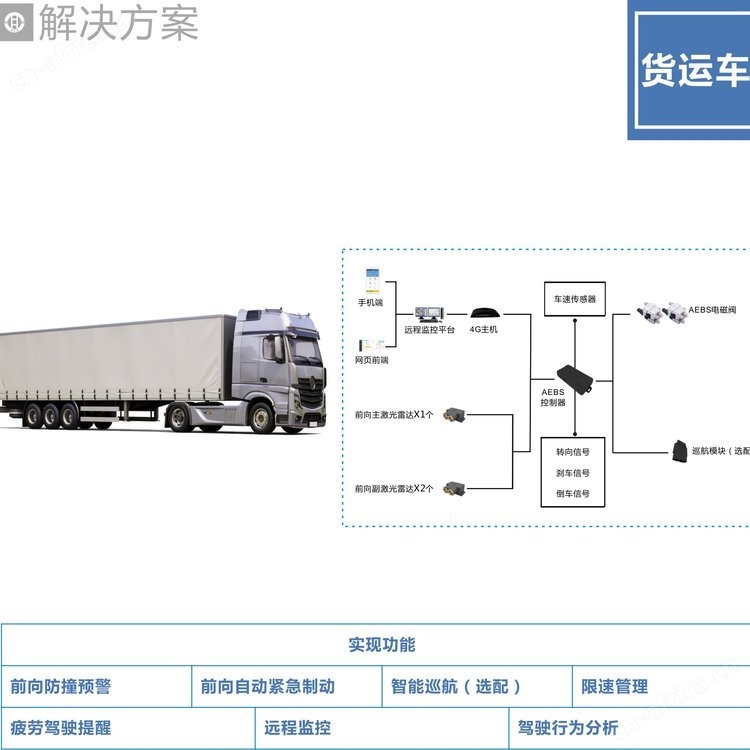
产品组成

护航商用车自动紧急制动系统分别由激光雷达、预警主机、AEBS控制器、电磁阀、倒车模块五部分组成。
产品功能













所有评论仅代表网友意见,与本站立场无关。