南京航空航天大学机电学院“机械制造与自动化”为国家重点学科,师资和技术力量雄厚,建有国家、省部级重点实验室和工程中心5个。
南航机电学院楼佩煌教授牵头的专业队伍,潜心研究AGV十多年,拥有自主的知识产权、强大的研发能力和的技术水平,已形成面向不同行业应用的AGV产品系列。目前主要研究成果包括AGV控制器、AGV调度软件、无线呼叫控制系统、AGV小车。
一、AGV控制器
南京航空航天大学AGV控制器型号为RKC-001系列控制器,是一款应用于低速无人驾驶和自主移动机器人领域的专业控制器产品,具有高性能、高集成度、高可靠性等特点。产品匹配完善的二次开发环境(IEC标准),高度贴合移动机器人的应用场合。主要支持磁导航、视觉导航、惯性导航,具备激光避障、视觉避障、接触避障等功能。
控制器具有移动机器人三级安全运行控制管理、机器人运动控制分解算法、机器人应用功能控制运算、数据采集和通讯处理等功能。控制器支持标准CANOPEN、MODBUS通讯协议和自定义通讯协议。 控制器支持非隔离数字信号输入、数字信号输出、模拟信号输入及隔离模拟信号输出。控制器使用方便,集成多种控制算法,可以直接调用,支持PLC编程和控制,可以广泛应用于各类AGV系统。
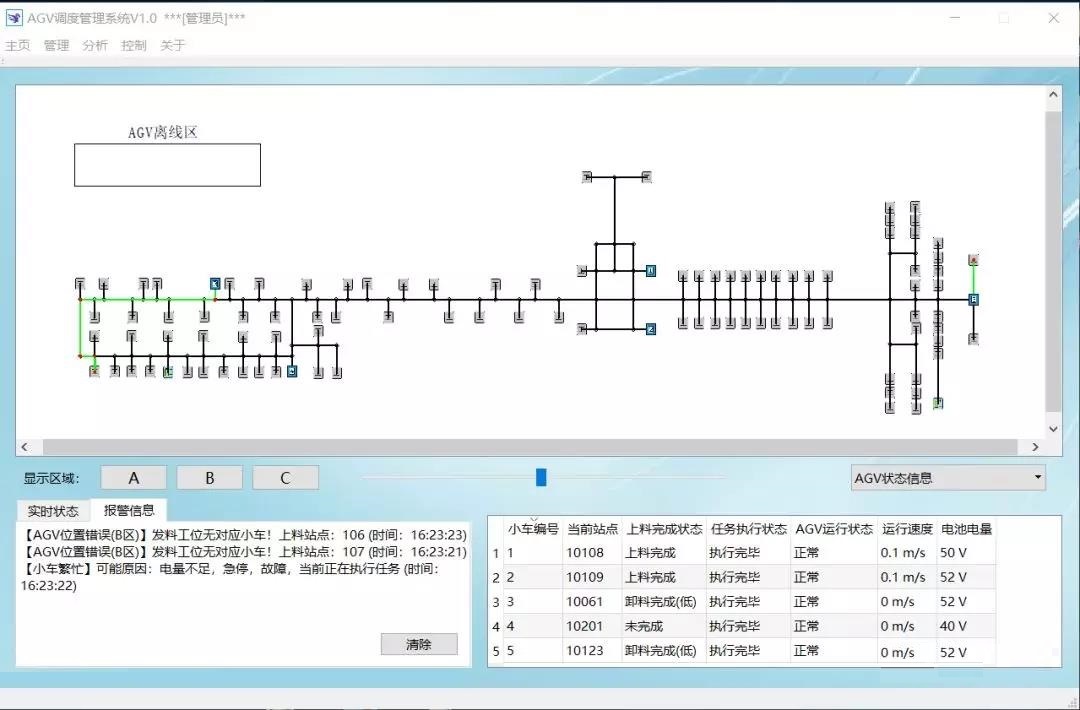
二、AGV调度软件
RKS-911调度系统具有地图建模、调度任务管理派发、AGV路径规划与导航、交通管制、AGV实时状态监测等功能。通过的智能调度优化算法,能无缝与MES系统和PLC系统对接,实现自动呼叫、智能管控,已成功应用于全国多个AGV系统项目。
三、无线呼叫控制系统
无线呼叫控制系统,主要用于调度系统/MES人机远距离交互,设置急停、复位、上料、下料等操作按钮,通过远距离无线技术,实现多个工位信号指令采集与对接。系统采用射频技术,超低功耗技术,传输距离超过200m。具有安装方便,稳定可靠的特点。
基于以上AGV控制系统,目前在学校实验室得到充分论证的产品包括以下几类:
牵引式AGV【点击】
顶升式AGV【点击】
全向移动式AGV【点击】