上下料机器人的项目里,偶尔会遇到实时查看上下料机器人速度、位置、扭矩的需求,在此类需求里,很多工业机器人厂家都配备了相关的功能,通过程序编写,将这些数值都输出出来。
 (网图,侵删)
(网图,侵删)
下面就看一下ABB上下料机器人,要怎么才能获取这些值。
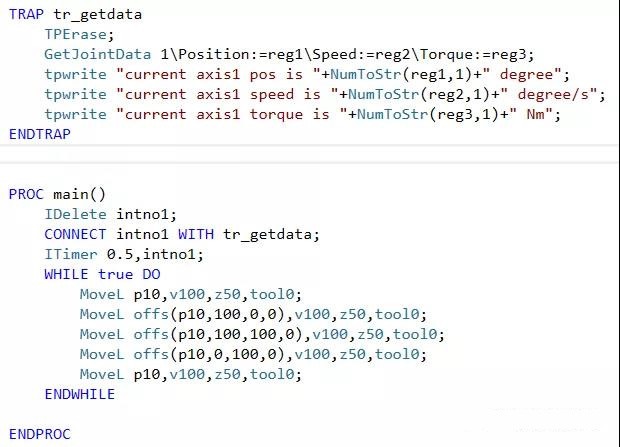
ABB机器人有一条指令,叫:GetJointData,顾名思义,获取轴数据。详细内容包括:GetJointData 1\Position:=reg1\Speed:=reg2\Torque:=reg3。以上的数据,会把上下料机器人1轴的位置存储在reg1,速度存储在reg2,扭矩存储在reg3。如果要获取外轴,可以使用可选参数ExtTorque,这里就不再详述。
轴数据有****的实时性,这里如果希望每0.5s获取一次相关数据并写屏,可以使用定时中断,具体代码可以参考下面这张图。
由于上下料机器人在越来越多行业里的广泛运用,给许多领域带来了新的血液,对机器人也提出了越来越多的要求,想知道更多上下料机器人相关的资讯和案例,可在线咨询睿易智能。