
2026年01月10日 08:37:40 来源:北京博米科技有限公司 >> 进入该公司展台 阅读量:18
摄影术—电子静止图像成像—噪声测量
目录
1
2
3
4
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
5
5.1
5.2
5.3
5.4
6
6.2
6.3
附录 A(规范性附录)噪声分量分析 17
附录 B(规范性附录)视觉噪声测量 20
附录 C(资料性附录)清除图像数据的低频率变化 29
附录 D(资料性附录)测定信噪比的推荐程序 31
附录 E(资料性附录)各个输出媒体的推荐实用观察条件 32
规则进行起草的。
请注意本文件的一些要素可能具有权。ISO不负责识别任何或者所有这些权。关于本文件制定过程中确定的任何权, 见引言与/ 或ISO 已收到的声明表。
本文件采用的任何商品名只是为了方便使用者,不代表认可。负责本文件的委员会是ISO/TC 42(摄影术)。
经技术修订,本第二版取消和取代版(ISO 15739:2003)。
)阻挡滤波器
如需要,根据 ISO 14524 的规定,必须采用一个红外线阻挡滤波器。
4.6
测量
5.2.1 概述
 该方法涉及到数码照相机传感器直接曝光到特定的均匀照明数量,镜头被拆除。照明必须具有第 4.2 条规定的光谱特征,并且必须由一定距离的小光源产生;光源和传感器的尺寸不超过它们之间距离的二十分之一,如图 1 所示。如果反射表面对传感器造成额外的照明, 那么不应该放置反射表面。
该方法涉及到数码照相机传感器直接曝光到特定的均匀照明数量,镜头被拆除。照明必须具有第 4.2 条规定的光谱特征,并且必须由一定距离的小光源产生;光源和传感器的尺寸不超过它们之间距离的二十分之一,如图 1 所示。如果反射表面对传感器造成额外的照明, 那么不应该放置反射表面。
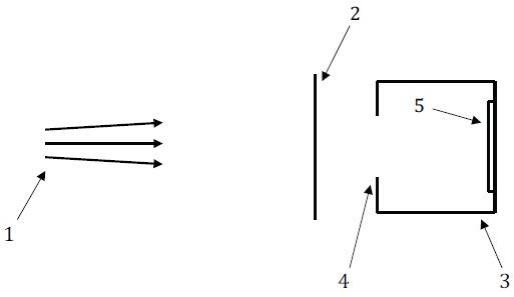
符号
1 光源 2 测试密度 3 被测照相机 4 被拆除的镜头 5 数字图像传感器
图 1—具有可拆除镜头的照相机照明
5.2.2 焦面 OECF 必须先按照 ISO 14524 进行测量。
5.3 测量
5.3.1 概述
采用手动曝光控制,或者基于一个单独曝光控制传感器进行曝光控制的所有照相机必须采用这些测量。
5.3.2 照相机 OECF 必须按照 ISO 14524 进行测量。
5.3.3 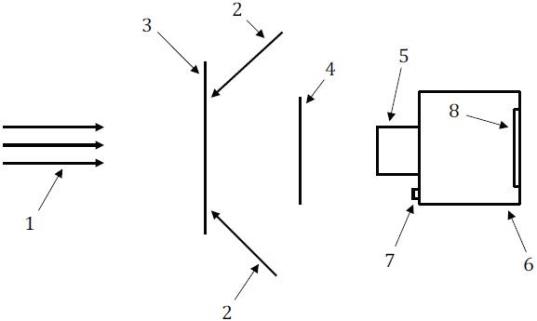 扩散片必须是始终一致、靠近照相机,少于被测照相机最小焦距的十分之一,以便防止扩散片瑕疵影响噪声测量。扩散片必须采用透射或者反射光进行照明(见图 2)。
扩散片必须是始终一致、靠近照相机,少于被测照相机最小焦距的十分之一,以便防止扩散片瑕疵影响噪声测量。扩散片必须采用透射或者反射光进行照明(见图 2)。
符号
1 透射式均匀固定水平光源 2 反射式均匀固定水平光源 3 扩散片 4 测试密度
5 照相机镜头 6 被测照相机 7 照相机曝光控制传感器 8 数字图像传感器
图 2—均匀场噪声测量
5.4 DSC
5.4.1 概述
这些测量必须被用于 TTL 自动曝光照相机,无手动曝光控制超越。
5.4.2 照相机 OECF 必须先按照 ISO 14524 进行测量。
5.4.3 根据 IEC 61966-2-1 的定义,对于产生每通道 8 位 sRGB 编码信号的照相机,必须调整光源,在 ISO 14524:2009 规定的 OECF 测试图中心部分的背景里,使像素值等于 118。测试图背景必须被渲染,使像素值不小于 110、不大于 130。
如果照相机不能提供上述范围的像素值,例如由于自动曝光控制,那么 OECF 中心部分的透射率(或者反射率)可能出现变化。对于一个透射图,该图的中心部分可以被替换成中性密度(ND)过滤器。对于一个反射图,可以把一个中性密度反射斑块放在该图中心部分上。过滤器(斑块)的透射率(反射率)最初选定为近似于图背景的透射率(反射率)。如果图
背景水平超过 130,那么选择一个更低密度的中性密度过滤器(更高反射斑块)。照相机的自动曝光控制系统将选择一个更低曝光水平,弥补该图增加的光线。这将导致更低的图背景水平。注意,图背景水平是从测试图的原有背景区域测量的,而不是从替代的中性密度过滤器测量。如果照相机仍然不能提供上述范围的像素值,那么必须在报告里说明照相机不能提供所要求的测试图水平;并且必须报告已提供的测试图背景的像素值。
如果一个照相机产生其他颜色编码的信号,必须调整光源,使输出像素值的编码值对应于
OECF 测试图背景的感知中间调。必须报告已实现的感知中间调。
注:如果数码相机采用一个单独的相机曝光控制传感器,如图 2 所示,可以采用一个合适的中性密度过滤器,覆盖在相机曝光控制传感器上,以便把测试图背景信号调整到被要求的水平。
5.4.4 测试图必须是符合 ISO 14524 的照相机 OECF 测试图,可以是透射的或者反射的(见
图 3)。测试图必须具有充足的密度范围,当测试图背景是在规定的编码值时,最亮斑块等于或者高于照相机高亮剪辑水平。在大多数情况下,这要求高对比度透明测试图和背照式。推荐采用高对比度透射 20 斑块 OECF 测试图,对比率为 10,000:1。
5.4.5 测试图密度斑块的不均匀性必须小于预期照相机噪声水平的十分之一,任何图像结构空间构件的空间频率至少是照相机极限分辨率的 10 倍。如果测试图里空间构件的频率小于该水平,那么图像里的测试图尺寸必须减小,来实现被要求的空间频率;或者目标图像必须散焦,使结构不影响到噪声测量水平。测试图制造商必须提供相关信息,说明当测试图填满照相机框架时,测试图将支持的极限分辨率。
5.4.6 测试目标必须由被测照相机准确地聚焦。如必要,目标可以稍微不对准焦距,来符合
5.4.5 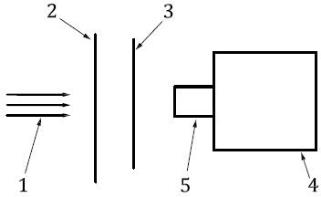 的要求。
的要求。
a) 采用透射式测试图的测试布置
b) 采用反射式测试图的测试布置
符号
1 均匀固定水平光源 2 扩散片 3 测试图 4 被测照相机
5 照相机镜头 6 45°均匀照明 7 额外遮盖
图 3—测试图噪声测量
6
大面积
6.2.1 概述
对于 5.2 所述的方法,信噪比是根据在曝光(参考曝光的 13%)时捕获的数据来确定。对于
5.3 和 5.4 所述的方法,信噪比是根据在某个亮度(参考亮度的 13%)捕获的数据来确定。在方法 5.2 和 5.3 里,通过采用 5.1.2.所述的密度,曝光和亮度分别出现变化。在方法 5.4 里, 采用 ISO 14524 规定测试图的密度斑块,确定信噪比。
对于测试密度,总噪声被转化成一个输入参考增量信噪比,被报告为 DSC 信噪比。
第 6.2.2 节描述了参考亮度和亮度值的确定方法,信噪比是在参考亮度和亮度值进行计算的。在第 6.2.2 节里,总结了参考曝光和曝光值的确定方法,信噪比是在参考曝光和曝光值进行计算的。
6.2.2 确定参考亮度和亮度值,计算信噪比
![]() 如果采用方法 5.3 和 5.4 来测量照相机 OECF,参考亮度必须被确定为亮度值对数,对应于照相机 OECF 曲线上的 245 像素值。如必要,可以采用一个插值函数来确定参考亮度值。上述规定适用于产生 IEC 61966-2-1 规定的 8 位 sRGB 信号的照相机系统。如果照相机产生其他颜色编码的图像,那么参考亮度必须被确定为亮度值对数,对应的像素值是线性化照相机高亮剪辑水平的 91%;例如,在 ROMM 颜色编码空间,亮度值对数被确定为线性 ROMM 值,等于 1.0 的 91%,即 0.91。这对应于 12 位非线性 ROMM 颜色空间里的 3886 整数值。在数学上,对于 8 位 sRGB 信号,亮度值对数—照相机参考亮度被定义为:
如果采用方法 5.3 和 5.4 来测量照相机 OECF,参考亮度必须被确定为亮度值对数,对应于照相机 OECF 曲线上的 245 像素值。如必要,可以采用一个插值函数来确定参考亮度值。上述规定适用于产生 IEC 61966-2-1 规定的 8 位 sRGB 信号的照相机系统。如果照相机产生其他颜色编码的图像,那么参考亮度必须被确定为亮度值对数,对应的像素值是线性化照相机高亮剪辑水平的 91%;例如,在 ROMM 颜色编码空间,亮度值对数被确定为线性 ROMM 值,等于 1.0 的 91%,即 0.91。这对应于 12 位非线性 ROMM 颜色空间里的 3886 整数值。在数学上,对于 8 位 sRGB 信号,亮度值对数—照相机参考亮度被定义为:
式中,
Rref 是在参考亮度时的亮度值对数; S−1 是照相机 OECF 曲线 S 的倒数; I 是像素值。
如果照相机是一个多频谱系统,参考亮度必须根据具有信号水平的通道进行确定。
范例:产生 8 位 sRGB 图像的照相机系统分别在 2,65、2,56 和 2,61 输入亮度值对数,为红色、绿色、蓝色通道产生 245 像素值。参考亮度是从绿色通道测量的,因为绿色通道的像素值先达到 245,比红色和蓝色通道早。参考亮度等于 2,56。
在亮度值等于 13%参考亮度时,测量总的固定模式和时间信噪比。这可以被表述为:
![]()
式中,
LSNR 是总的固定模式和时间信噪比被测量时的亮度; Lref 是在参考亮度 Rref,亮度值对数的反对数。
取公式(4)两边的对数:
![]()
式中,RSNR = log(LSNR)和 Rref = log(Lref)。因此在照相机 OECF 曲线上,测量总的固定模式和时间信噪比时,亮度可以简单地确定为亮度值对数,即参考亮度 Rref 下|log(0,13)|。
6.2.3 确定信号-总噪声比率
信号-总噪声比率 Qtotal 被确定为:
![]()
增量增益 gSNR 是 OECF 曲线的一阶导数;在照相机 OECF 情况下,根据 ISO 14524 规定的方法在 RSNR 亮度值对数进行确定。根据标准偏差来计算噪声,精度是由数字编码值采用的数字分辨率进行定义。如必要,可以采用一个插值函数,来确定信号-总噪声比率的精确估计值。
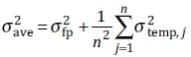
 总噪声σtotal 的平均值是 n 个总噪声样本标准偏差的平均值,公式是:
总噪声σtotal 的平均值是 n 个总噪声样本标准偏差的平均值,公式是:
6.2.4 确定固定模式信噪比
固定模式信噪比的确定是取至少八个曝光的平均值,并且应用一个修正来确定固定图像噪声的真实水平。对于测试密度,固定图像噪声被转化成一个输入参考增量信噪比,被报告为DSC 固定模式信噪比。
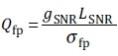 DSC 固定模式信噪比 Qfp 是根据以下公式确定的:
DSC 固定模式信噪比 Qfp 是根据以下公式确定的:
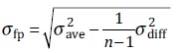
固定图像噪声的平均值是:
![]()
式中,
σfp 是固定图像噪声的标准偏差;
σave 是 n 幅图像平均图像的像素值的标准偏差;
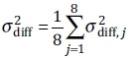
σdiff 是平均图像和单个图像所有差值的像素值的平均标准偏差。所有差值图像总和的平均值是:

式中,σdiff,j 是平均图像和第j 个图像之间差值的像素值标准偏差。公式(8)和(9)的推导根据附录 A 所示。
6.2.5 确定时变信噪比
时变信噪比的确定是通过测量每个图像和平均图像之间差值的标准偏差,并且应用一个修正来确定时间噪声的真实水平。对于测试密度,时间噪声被转化成一个输入参考增量信噪比, 被报告为 DSC 时变信噪比。
时变信噪比 Qtemp 是根据以下公式确定的:
![]()
时间噪声的平均值是:
![]()
式中,
σtemp 是时间噪声的标准偏差;
σdiff 是平均图像和单个图像所有差值的像素值的平均标准偏差;更多详情见 6.2.4。
6.2.6 确定参考曝光和曝光值,计算信噪比
如果焦面 OECF 已经采用 5.2 所述方法进行了测量,参考曝光必须被确定为曝光值对数,对应于焦面 OECF 曲线上的 245 像素值。术语“亮度”必须替代成“曝光”,提到照相机 OECF 的所有地方必须被替换成焦面 OECF。6.2.2 到 6.2.5 描述的方法必须适用。
动态范围
![]() DSC 动态范围被报告为未剪辑输入亮度 Lsat 与最小输入亮度 Lmin 之间的比率,信号-时间噪声比率至少是 1。动态范围 DR 是根据以下公式确定的:
DSC 动态范围被报告为未剪辑输入亮度 Lsat 与最小输入亮度 Lmin 之间的比率,信号-时间噪声比率至少是 1。动态范围 DR 是根据以下公式确定的:
![]() 当黑色电平剪辑妨碍直接测量 Lmin,可以采用以下 2.0 密度“黑色参考”,测量照相机信号-时间噪声比率,来估计最小输入亮度:
当黑色电平剪辑妨碍直接测量 Lmin,可以采用以下 2.0 密度“黑色参考”,测量照相机信号-时间噪声比率,来估计最小输入亮度:
式中,σtemp,2 是采用 2,0 测试密度进行测量的黑色时间噪声,g2 是采用 2,0 测试密度进行测量的增量增益。
注:随着增量增益接近零,确定增量信号-时间噪声比率就成为不可能。
![]() 黑色时间噪声的推导方式类似于 6.2.5 里的时间噪声推导方式,即测量每个图像和平均图像之间差值的标准偏差,并且应用一个修正来确定时间噪声的真实水平。
黑色时间噪声的推导方式类似于 6.2.5 里的时间噪声推导方式,即测量每个图像和平均图像之间差值的标准偏差,并且应用一个修正来确定时间噪声的真实水平。
式中,
σtemp 是时间噪声的标准偏差;
σdiff 是平均图像和单个图像所有差值的像素值的平均标准偏差;更多详情见 6.2.4。
注:如可能,亮度测量时的密度必须提供增量信号-时间噪声比为 1。建议采用具有高动态范围的透射图,来确定 DSC 动态范围。如果所用测试图的动态范围不够高,那么采用的透射率必须等于剪辑透射率的 0.01,来确定 DSC 动态范围。
除了以比率形式报告 DSC 动态范围,动态范围也可以采用密度范围或者 F 光圈进行报告。
如果采用密度范围,那么 DSC 动态范围是:
![]()
如果采用 F 光圈形式报告,那么 DSC 动态范围是:
![]()
附录A
(规范性附录) 噪声分量分析
A.1 目标
A.1.1 概述
本分析的目标是表明噪声分量的真实水平能够根据若干样本及其平均值进行计算。原则上, 有可能把被捕获的图像数量减少到二个。然而,这增加了噪声值的统计不确定性。
![]() 数码照相机的图像噪声是由固定模式分量和时变分量组成。假设两个噪声分量没有相互关系,总噪声关系如公式 A.1 所示:
数码照相机的图像噪声是由固定模式分量和时变分量组成。假设两个噪声分量没有相互关系,总噪声关系如公式 A.1 所示:
A.1.2 分析
以下符号必须被用于噪声分量分析。p(x,y)是图像的像素值(x,y); pfp(x,y)是图像的固定模式部分; ptemp(x,y)是图像的时变部分;
σtotal 是 p(x,y)的标准偏差,总噪声;
σfp 是 pfp(x,y)的标准偏差,固定图像噪声。σtemp 是 ptemp(x,y)的标准偏差,时间噪声; σave 是几个图像平均像素值的标准偏差;
σdiff 是两个图像差异部分的像素值标准偏差。
A.1.3 固定图像噪声
 固定图像噪声的测定是通过分析 n 幅图像—从 p1 到 pn 的平均图像。按照定义,图像的固定模式部分对于所有图像而言是相等的,平均图像的像素值是:
固定图像噪声的测定是通过分析 n 幅图像—从 p1 到 pn 的平均图像。按照定义,图像的固定模式部分对于所有图像而言是相等的,平均图像的像素值是:
 由于不同图像的时间噪声之间不存在相互关系,平均图像的像素值差异是:
由于不同图像的时间噪声之间不存在相互关系,平均图像的像素值差异是:
![]() 如果时间噪声的差异平均值被表示为σ temp,那么
如果时间噪声的差异平均值被表示为σ temp,那么
因此,σave 包括固定图像噪声加上由于时间噪声导致的额外、残余的影响。
A.1.4 时间噪声
时间噪声的测定是通过分析每个图像与平均图像之间差值的标准偏差。差值图像的像素值是:

 差值图像像素值的差异平均值是:
差值图像像素值的差异平均值是:
因此,时间噪声的标准偏差为:
![]()
采用该结果,固定图像噪声的标准偏差能够通过公式 B.2 得出的结果来计算:
注:如果固定图像噪声的标准偏差比时间噪声的标准偏差小得多,在样本量小的情况下,可能是样本不确定性导致固定图像噪声是零或者负数的平方根。解决方法是增加样本数量。
A.2 采用八个图像的方法
A.2.1 逐步描述
1) 为了利用已捕获图像的完整信息,首先平均图像被计算,平均图像的标准偏差被估计, 得出σave。
2) 第二步是计算每个图像和平均图像的差值。
3) 第三步是计算差值图像像素值的标准偏差,得出σdiff,j,其中 j = 1 到 8。
4)  第四步是计算差值图像的所有平方标准偏差的平均值,得出:
第四步是计算差值图像的所有平方标准偏差的平均值,得出:
5) 时间噪声的标准偏差被计算为:
![]()
6) 固定图像噪声的标准偏差被计算为:
![]()
A.2.2 采用范例数据的方法评价
A.2.2.1 范例数据
表 A.1 显示了八个图像的平均像素值范例、每个图像的标准偏差值σtotal 范例,以及每个图像和平均图像之间差值的像素值标准偏差。注意,本范例所述的方法也适用于 OECF 测试目标图像的一个区域,对应于目标上的一个斑块。
表 A.1 —八个图像的噪声数据范例
图像 n | 平均像素值 | σtotal | σdiff |
1 | 91,2 | 2,17 | 1,91 |
2 | 91,0 | 2,18 | 1,92 |
3 | 91,0 | 2,10 | 1,87 |
4 | 90,9 | 2,14 | 1,89 |
5 | 90,95 | 2,12 | 1,89 |
6 | 90,8 | 2,13 | 1,92 |
7 | 91,10 | 2,12 | 1,91 |
8 | 91,1 | 2,19 | 1,93 |
A.2.2.2 评价
第 1 步:平均图像的平均像素值是 91,05(根据表 A.1),八个图像平均图像的像素值标准偏差是 1,01,即σave = 1,01。
第 2 步到第 4 步:八个差值图像的平方标准偏差的平均值是 3,63(根据表 A.1),即σ2diff = 3,63。第 5 步:公式(A.3)得出时间噪声的标准偏差为 2,04,即σtemp = 2,04。
第 6 步:固定图像噪声的标准偏差能够按照公式(A.4)进行计算,σfp = 0,71。
可通过核对时间噪声和固定图像噪声的平方和导致表 A.1 所示的总噪声对计算结果进行校验。
时间噪声和固定图像噪声的平方数总和的平方根是 2,16,表 A.1 的总噪声平均值是 2,14。
附录B
(规范性附录) 视觉噪声测量
B.1 概述
本附录提供了视觉噪声级的测量方法。视觉噪声被认为是一个输出等效噪声,不同于 6.2 所述的标准照相机信噪比。该方法的一般步骤如下所述。
1) OECF 目标的图像被拍摄,如 5.4 所述。
2) RGB 图像必须通过 XYZ 被转化成相反的颜色,白色—黑色,红色—绿色和黄色—蓝色。
3) 视觉噪声级测量被设计为联系图像里噪声的视觉外观,测量的图像是代表在一些指定的参考观察条件,一些指定参考媒介上的预期颜色外观。本附录提供的具体方法是测量那些图像的视觉噪声级,那些图像是采用 IEC 61966-2-1 规定的 sRGB 颜色编码进行编码的。
注:其他颜色编码的图像通常能够被转化成 sRGB,例如采用 ISO 15076-1 定义的 ICC 颜色管理。如果其他编码的参考媒介和观察条件与 sRGB 参考展示和观察条件迥然不同,那么转化成 sRGB 并且应用本附录的方法而获得的视觉噪声测量将不一定和原有图像里的噪声视觉外观互相关联。 4)采用离散傅里叶变换,每个密度斑块的图像数据被转化成空间频率域。
5) 对于图像高度而言,人眼在特定视角的对比灵敏度函数(CSF)被用于对噪声谱进行加
权。采用逆离散傅里叶变换,被加权的噪声谱被转化回到空间域。
6) 之后,图像被转化成 XYZ,再转化成均匀 L*u*v*颜色空间,根据 CIE 的定义。
7) 对于每个轴,计算了被过滤噪声的三个标准偏差的加权和。图 B.1 的流程图表明人类视觉系统的处理和视觉噪声算法之间存在高度对比。
视觉噪声测量领域是一项正在进行的重要研究活动。本国际标准未来修改时,视觉噪声的测量方法可能发生变化。
![]()
![]()
![]()
![]()
![]()
XYZ (D65) -> L* u* v* |
XYZ (E) -> XYZ (D65) |
AC1C2 -> XYZ (E) |
CSF 过滤 |
人类视觉系统 |
对应算法 |
物体 |
RGB 图像 |
![]()
![]()
眼视光学 |
RGB -> XYZ (E) |
![]()
![]()
视锥细胞 |
XYZ (E) ->AC1C2 对立色空间 |
![]()
![]()
神经系统(颜色感知) |
离散傅里叶变换(DFT) |
神经系统(对比) |
逆离散傅里叶变换 |
识别 |
图 B.1 —人类视觉系统和对应的视觉噪声算法
B.2 ![]()
标准偏差的加权和 |
视觉噪声测量采用的算法
B.2.1 RGB 到 XYZ(E)
R、G 和 B 信号必须根据 sRGB 标准 IEC 61966-2-1 的定义。图像的 R、G 和 B 像素值进行
线性化,采用 sRGB 特征方程,观察者观察到的黑点无缩放:

其中 Cc 代表 R、G 和 B sRGB 图像像素值,Cm 代表 sRGB 像素值,例如 8 位每成分 sRGB的是 255,Cn 代表标准化非线性 R、G 和 B sRGB 数值,而 Cl 代表线性化 R、G 和 B sRGB 数值。
 采用以下转换矩阵,线性化 sRGB 数值之后被转化成 XYZ (E)。采用线性化布拉德福德转换, 得到颜色适应变换(CAT)矩阵,把 XYZ 数值从 D65 转化成光源 E。CAT 矩阵根据公式 B.2 得到:
采用以下转换矩阵,线性化 sRGB 数值之后被转化成 XYZ (E)。采用线性化布拉德福德转换, 得到颜色适应变换(CAT)矩阵,把 XYZ 数值从 D65 转化成光源 E。CAT 矩阵根据公式 B.2 得到:
 线性化布拉德福德矩阵被用于推导 CAT 矩阵,见公式 B.3:
线性化布拉德福德矩阵被用于推导 CAT 矩阵,见公式 B.3:
线性化sRGB 数值转化成XYZ (E)数值所需的矩阵是把IEC 61922-2-1 的sRGB 到XYZ (D65)
矩阵乘以公式 B.2 里的矩阵。这产生了变换矩阵 B.4:

注:如果图像数据不在 sRGB 颜色编码空间里,而存在 ICC 颜色特征化文件,那么图像数据必须被直接转化成 XYZ (E)数值,而不是先把数据转化成 sRGB。
B.2.2 XYZ(E)到对立色空间 AC1C2
采用以下矩阵,三色值 XE、YE 和 ZE 被转到对立色空间 A、C1 和 C2:

对立色空间 A、C1 和 C2 根据参考文献[5]所述。
B.2.3 离散傅里叶变换
采用离散傅里叶变换,对立色反应组 A、C1 和 C2 从空间域转到频率域Â、Ĉ1 和Ĉ2:

注:频率单位是周期每像素。
B.2.4 应用对比灵敏度函数
在频率域里,通过一套人类视觉系统相应的空间反应,对每个反应进行加权。有很多方面会影响人眼的对比灵敏度。因此有必要选择一套能够代表典型观察条件的对比灵敏度。基于Johnson 和 Fairchild[12] 规定的 CSF 函数,为本国际标准选择了一套对比灵敏度函数。亮度通道采用的CSF 是基于Movshon 的工作,而色度通道采用的CSF 是在Van der Horst 和Poirson 提供的数据集上建模的。
![]() 亮度通道 CSF 建模采用的函数 A 是根据以下公式:
亮度通道 CSF 建模采用的函数 A 是根据以下公式:
式中,所用的变量见表 B.1。
|
表 B.1—亮度 CSF 函数采用的变量亮度通道(A)变量
频率 f 的单位是周期/视角度数。
注:公式(B.7)所述的亮度对比灵敏度函数主要适合 DSCs,这些 DSCs 把低水平图像噪声引入被捕获图像中。
色度通道 C1 和 C2 的 CSF 建模采用的函数是根据以下公式:

式中,所用的变量见表 B.2。
表 B.2 —色度通道 CSF 函数采用的变量
色度变量 | C1 | C2 |
a1 | 109,1413 | 7,0328 |
b1 | 0,0004 | 0 |
c1 | 3,4244 | 4,2582 |
色度变量 | C1 | C2 |
a2 | 93,5971 | 40,691 |
b2 | 0,0037 | 0,1039 |
c2 | 2,1677 | 1,6487 |
K | 202,7384 | 40,691 |
S | 0 | 7,0328 |
对比灵敏度函数见图 B.2 所示。
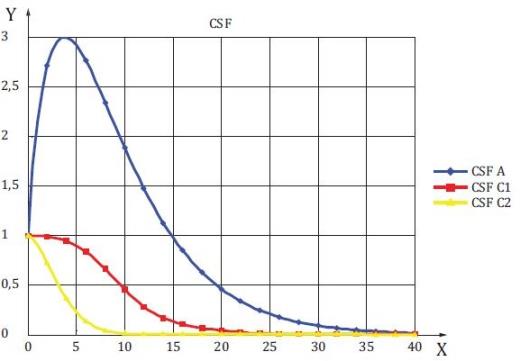
图 B.2 —ISO 15739 里的人眼功能的对比灵敏度
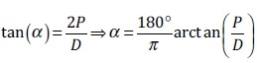 在 CSF 模型被应用于 B.2.3 计算的频率数据之前,数据需要先从周期/像素单位转化成周期/ 视角度数单位。按照尼奎斯特定理(Nyquist),一个图像能够表示的频率是 0,5 周期/像素。为了把周期/像素转化成人眼对比灵敏度采用的周期/度数,我们需要知道观察者看的幅图里每个像素的尺寸(像素间距)和观察距离。在尼奎斯特频率,一个周期里对向的视角α是根据以下公式:
在 CSF 模型被应用于 B.2.3 计算的频率数据之前,数据需要先从周期/像素单位转化成周期/ 视角度数单位。按照尼奎斯特定理(Nyquist),一个图像能够表示的频率是 0,5 周期/像素。为了把周期/像素转化成人眼对比灵敏度采用的周期/度数,我们需要知道观察者看的幅图里每个像素的尺寸(像素间距)和观察距离。在尼奎斯特频率,一个周期里对向的视角α是根据以下公式:
式中,
P 是像素间距; D 是观察距离。
 以周期/度数为单位的频率是:
以周期/度数为单位的频率是:
采用以下公式,图像被过滤:

WA 是公式(B.7)规定的 CSF 等式,系数见表 B.1。表 B.2 里的 C1 和 C2 系数被分别代入 B.8 的
CSF 等式,推导出 WC,1 和 WC,2。
B.2.5 逆离散傅里叶变换
通过逆离散傅里叶变换,每个补偿性反应被转到空间域里。这被表述为:

如果逆离散傅里叶变换的输出含有复值,那么必须取输出的幅度。
B.2.6 对立色空间AC1C2 到 XYZ(E)里
三个对立色反应 Af, C1,f 和 C2,f 被转到三色值 XE、YE 和 ZE,采用的矩阵等于公式(B.5)的倒数。矩阵如下所示:

B.2.7 XYZ (E)到 XYZ (D65)
 数值 XE、YE 和 ZE 被转到三色值 XD65、YD65 和 ZD65,采用的矩阵等于 B.2 的倒数。矩阵如下所示:
数值 XE、YE 和 ZE 被转到三色值 XD65、YD65 和 ZD65,采用的矩阵等于 B.2 的倒数。矩阵如下所示:
如果任何三色值是负数,那么在计算公式(B.16)时,像素必须被省略。如果合量 N 小于原有N 的三分之二,那么斑块水平数据必须被省略。
B.2.8 XYZ (D65)到 L*u*v*
三色值被转化成 CIE L*u*v*颜色空间,如下所示:
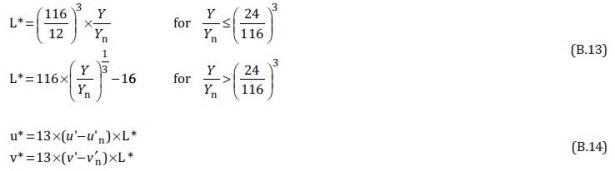
对于 D65 白点,

注:CIE L*u*v*颜色空间被采用,因为它为小色差提供了非常好的感知均匀性。
B.2.9 确定每个灰色斑块的标准偏差
沿着均匀颜色空间的三个轴(L*、u*、v*),颜色噪声的标准偏差如下所示:

式中,N 等于每个斑块里的已评估像素数量。像素数量 N 必须等于或者大于 64。
B.2.10 代表视觉噪声的加权和
![]() 视觉噪声被定义为沿着 L*、u*和 v*轴,颜色噪声的三个标准偏差的总和。确定视觉噪声值的等式如下所示:
视觉噪声被定义为沿着 L*、u*和 v*轴,颜色噪声的三个标准偏差的总和。确定视觉噪声值的等式如下所示:
公式(B.17)只是为了空间频率加权的目的,测量视觉噪声。
B.3 视觉噪声测量
B.3.1 测试条件
B.3.1.1 测试图是 ISO 14524 所述的测试图。
B.3.1.2 测试图的照亮和曝光方法见 5.4 所述。
B.3.1.3 推荐采用一个高对比度背照式透射 20 斑块 OECF 测试图,对比率为 10,000:1。
B.3.2 测试方法和采用软件来评估视觉噪声测量
B.3.2.1 视觉噪声的计算可以采用Windows 系统可执行的(或者同等的)软件。评估程序如下所述:
B.3.2.2 选择一个测试图的图像。
B.3.2.3 选择与图像相关的 ICC 颜色特征化文件。
B.3.2.4 输入以周期/度数为单位的频率,这是由图像的像素尺寸和观察距离得出的。
B.3.2.5 将打开一个测试图图像的展示窗口,将出现一个小长方形来表明感兴趣区域(ROI)。采用软件的评估程序必须如下所述:
1) 选择 ROI 长方形,将其放在一个斑块上方;
2) 调整该长方形的尺寸,使其处在斑块边界之内;
3) 斑块视觉噪声的计算值被显示在窗口底部,连同亮度的标准偏差数值 u*和 v*。
注:软件和矩阵实验室 Matlab 源代码可以从图像科学和技术协会(IS&T)下载。在运行执行文件之前, 必须安装矩阵实验室 Matlab Compiler Runtime 7.9 软件。
B.4 结果的报告
视觉噪声必须采用表格形式进行报告,栏是 OECF 测试图每个斑块的平均sRGB 像素值, 第二栏是 L*数值,对应于采用公式(B.1)、(B.4)和(B.13)计算出来的平均像素值,第三栏是该斑块的视觉噪声水平。如果原有输入图像的颜色编码空间不是 sRGB[见 B.1 c 注],那么原有图像里每个斑块的平均像素值必须被写在表格栏里。在这种情况下,被转化的平均 sRGB 像素值、L*数值和该斑块的视觉噪声水平必须在表格的第二栏、第三栏和第四栏进行报告。此外,必须报告 sRGB 像素值、观察距离和输出像素尺寸。可以报告输出图像高度和图像高度的像素数,来代替像素尺寸。sRGB 图像视觉噪声的样本评估见表 B.3 所示。
表 B.3 —范例视觉噪声数据
平均sRGB 像素值 | 亮度 | 视觉噪声水平 |
C | L* | H |
1,3 | 11,2 | 0,3 |
2,4 | 11,4 | 0,3 |
5,8 | 12,1 | 0,5 |
12,4 | 13,4 | 0,6 |
28,0 | 17,6 | 1,5 |
53,5 | 26,6 | 2,4 |
76,3 | 35,3 | 2,6 |
93,2 | 41,8 | 2,7 |
平均sRGB 像素值 | 亮度 | 视觉噪声水平 |
116,0 | 50,5 | 2,6 |
135,3 | 57,7 | 2,3 |
160,0 | 66,8 | 2,4 |
173,7 | 71,7 | 2,1 |
196,4 | 79,9 | 1,8 |
209,3 | 84,4 | 1,6 |
223,8 | 89,4 | 1,2 |
233,7 | 92,8 | 1,1 |
245,3 | 96,7 | 0,6 |
252,8 | 99,2 | 0,3 |
255,0 | 100,0 | 0 |
255,0 | 100,0 | 0 |
sRGB 像素值= 255 观察距离= 1000 毫米 输出像素尺寸= 0,266 毫米 | ||
附录C
(资料性附录)
清除图像数据的低频率变化
C.1 概述
许多 DSCs 镜头展示出缓慢变化的中心到边缘强度衰减。不均匀测试图照明也能在被捕捉图像里引入低频变化。在测量噪声之前,这些不均匀性必须从数字图像数据里清除,因为它们降低(增加)测量到的 R、G 和 B 噪声标准偏差。如果不均匀性有意义,要求采用高通滤波器来清除图像里的低频变化,那么可以采用本附录里的 13 × 13 FIR 高通滤波器。该滤波器具有线性化 R、G 和 B 图像数据,清除图像数据里的低频变化。该 FIR 高通滤波器的空间频率反应极大地衰减了图像空间频率,包括镜头不均匀性。
只有当测试图至多占据被捕获图像区域的 4 百万像素时,滤波器才能被应用。高通滤波器必须只应用于评估总的、固定模式和时间信噪比;不能被应用于视觉噪声测量。这是因为在高图像分辨率,该滤波器将影响 B.2.4 亮度对比灵敏度函数峰值区域里的频率范围。必须考虑其他清除低频变化的方法,例如捕捉均匀的白板进行补偿。
C.2 高通滤波器的应用
采用高通滤波器来清除低频变化,必须应用以下程序:
1) 测试图必须在四百万像素的区域内被捕获。例如,具有 4:3 纵横比的一个测试图,该测试图在图像传感器上至多只能占据 2312 × 1736 像素。如必要,照相机到测试图的距离可以变化,测试图可以被放在一个均匀反射背景上,其密度等于测试图背景密度。
2) 采用所用颜色编码空间的合适特征函数,被捕获图像的 R、G 和 B 像素值必须被线性化。
3) 在线性化照相机 OECF 测试图里,每个斑块的 DC 值必须被估计。这可能还需要计算在线性化 OECF 测试图图像里、每个斑块 R、G 和 B 像素值的平均值或者中间值。
4)13 × 13 高通 FIR 滤波器必须被应用于线性化图像。表 C.1 展示了必须采用的 13 × 13 内核的右下角象限。整个 13 × 13 内核被定义为反射底部 6 列和列,之后反射该结果和栏。由于表格数值冗余、对称,此处只详述了右下角象限。
注:13 × 13 FIR 滤波器清除了图像的 DC 成分,因此平均信号值无法根据滤波器输出值进行计算。必须注意确保在增加平均斑块数值之前,滤波器输出负值不会被剪辑到零。
5) 在 3)里计算的 DC 数值必须被增加到 4)里对应的高通滤波器过滤过的斑块。
6) 应用颜色编码空间的相关非线性函数,R、G 和 B 数据必须进行伽马校正。
表 C.1 —高通滤波器内核(右下象限)
0,996 926 | –0,006 47 | –0,007 4 | –0,006 09 | –0,009 6 | –0,003 82 | –0,009 64 |
–0,006 47 | –0,006 64 | –0,012 23 | –0,005 8 | –0,007 3 | –0,005 48 | –0,008 93 |
–0,007 4 | –0,012 23 | –0,001 73 | –0,009 89 | –0,005 71 | –0,007 06 | –0,007 18 |
–0,006 09 | –0,005 8 | –0,009 89 | –0,007 92 | –0,003 56 | –0,009 76 | –0,003 59 |
–0,009 6 | –0,007 3 | –0,005 71 | –0,003 56 | –0,009 64 | –0,006 54 | 0,000 124 |
–0,003 82 | –0,005 48 | –0,007 06 | –0,009 76 | –0,006 54 | –0,000 44 | 0,000 412 |
–0,009 64 | –0,008 93 | –0,007 18 | –0,003 59 | 0,000 124 | 0,000 412 | –0,000 13 |
该 13 × 13 FIR 滤波器清除了图像的 DC 成分,因此平均信号值 D 无法根据滤波器输出值进行计算。必须注意确保在增加平均斑块数值之前,滤波器输出负值不会被剪辑到零。 | ||||||
附录 D
(资料性附录)
测定信噪比的推荐程序
D.1 程序
附录 D 提供了本国际标准正文所述的信号—总噪声比率的推荐测定程序。类似程序可以被应用于测定固定模式和时间信噪比。
1)按照 ISO 14524,测定系统 OECF。对于具有可拆式镜头的照相机,可以测量焦面 OECF。对于具有固定式镜头和不可超越式自动曝光控制的照相机,测量照相机 OECF。2)按照公式(1),计算红色、绿色和蓝色水平的亮度分量。
3) 采用公式(2),在每个 64 × 64 OECF 测量区域内,测定像素值的标准偏差,以便计算照相机噪声的标准偏差σ(D)。
4)  测定系统在每个目标斑块亮度的增量增益 g(Lj),从稍低的亮度到该亮度,这种亮度变化造成的像素值变化,以及从该亮度到稍高的亮度,这种亮度变化造成的像素值变化,这两个像素值变化取平均值。见以下公式 D.1 所示。该方法不能被用于测定终点亮度的增量增益值。
测定系统在每个目标斑块亮度的增量增益 g(Lj),从稍低的亮度到该亮度,这种亮度变化造成的像素值变化,以及从该亮度到稍高的亮度,这种亮度变化造成的像素值变化,这两个像素值变化取平均值。见以下公式 D.1 所示。该方法不能被用于测定终点亮度的增量增益值。
式中,I 是像素值,Li、Lj 和 Lk 是 OECF 测试图里相邻的三个亮度水平。
一个类似的程序被用于测定曝光增量增益,在上述程序中“曝光”替代“亮度”。
5) ![]() 采用公式(D.2)和公式(7),以亮度或者曝光函数的形式,计算信号—总噪声数值。计算信号—总噪声数值的斑块亮度是由 Lj 确定。
采用公式(D.2)和公式(7),以亮度或者曝光函数的形式,计算信号—总噪声数值。计算信号—总噪声数值的斑块亮度是由 Lj 确定。
6) 确定亮度值,对应于 6.2.2 所述的参考亮度。
7) 确定亮度值 LSNR,在该亮度值计算信号—总噪声比率。这可以被确定为亮度值对数的反对数,|log(0,13)|,比参考曝光的亮度值对数低。见 6.2.2。
8) 根据 5)计算的信号—总噪声数值曲线,计算 7)确定的亮度值所在的信号—总噪声数值。如果 LSNR 数值不等于某个斑块的亮度,那么建议采用一个插值函数,来获取信号—总噪声的准确估计值。例如可以采用一个线性插值函数,来计算信号—总噪声曲线上两个点的信号—总噪声数值;其中一个点的亮度值稍低于亮度 LSNR,而另一个点的亮度稍高于亮度 LSNR。
附录 E
(资料性附录)
各个输出媒体的推荐实用观察条件
图像里存在伪影,会降低图像质量。被降低的质量取决于伪影的可见性。为了确定成像伪影的可见性,重要的一点是知道观察者观看图像的图像尺寸、观察距离和照明条件。成像伪影的其中一个例子是图像噪声。随着图像尺寸变小,像素尺寸变小,观察者无法区分单个像素, 或者甚至整组像素;观察者再也看不到像素之间的亮度或者颜色变化。这就降低了图像噪声的可见性。如果在电脑显示器上根据 99%放大率查看同一个图像(1 像素=1 显示器元素),那么由于观察者能够区分单个像素,该图像的噪声水平看起来高得多。
建议在普通图像查看情况下,采用以下查看条件:
1) 消费者照片打印查看:100 × 150 毫米打印照片可以从 250 毫米距离进行查看。这被为人类观察者放松查看的最短距离。光照条件必须符合 ISO 3664,ISO 查看条件 P2(CIE 光源 D50,500 lx ± 125 lx)。人眼的估计平均分辨极限是 1/60°,这相当于在 250 毫米查看距离, 0,073 毫米空间分辨率(大约 350 像素每英寸)。这意味着打印过程必须超过该分辨率,否则它可能成为空间质量评估的限制因素。
2) 计算机显示器查看:从 600 毫米距离查看计算机显示器上 99%放大率的图像,显示器分辨率大约是 4 像素每毫米。显示器的亮度必须大于 100 cd/m^2,彩色监视器上显示的白色色度必须大约是 D65 色度。周围照明和其他查看条件必须符合 ISO 3664 规定的、在彩色监视器上显示图像的评估条件。
3) 专业照片打印查看:从 750 毫米距离查看 400 × 600 毫米打印照片,这是查看墙上挂着的有相框照片的典型例子。照明条件必须符合 ISO 3664,ISO 查看条件 P2(CIE 光源D50,500 lx ± 125 lx)。
4) 手机查看:在 960 乘以 640 像素的 89 毫米(对角线)显示器上,从 250 毫米距离来查看图像。显示器亮度、周围照明和其他查看条件必须符合 ISO 3664 规定的、在彩色监视器上显示图像的评估条件。
5) 高清电视查看:在 1 920 × 1 080 像素、1 070 毫米(对角线)高清电视显示器上,全屏查看图像,水平视角小于 30°,代表 1,74 米查看距离。如果图像的纵横比不同于显示器纵横比, 那么图像的显示必须确保图像高度填满显示器高度,图像左右侧区域显示出显示器的黑色亮度。所有查看条件必须符合 ISO 3664 规定的、在彩色监视器上显示图像的评估条件。




